DELTA TAU PMAC2-PC-ULTRALITE
Brand:DELTA TAU
Origin:USA
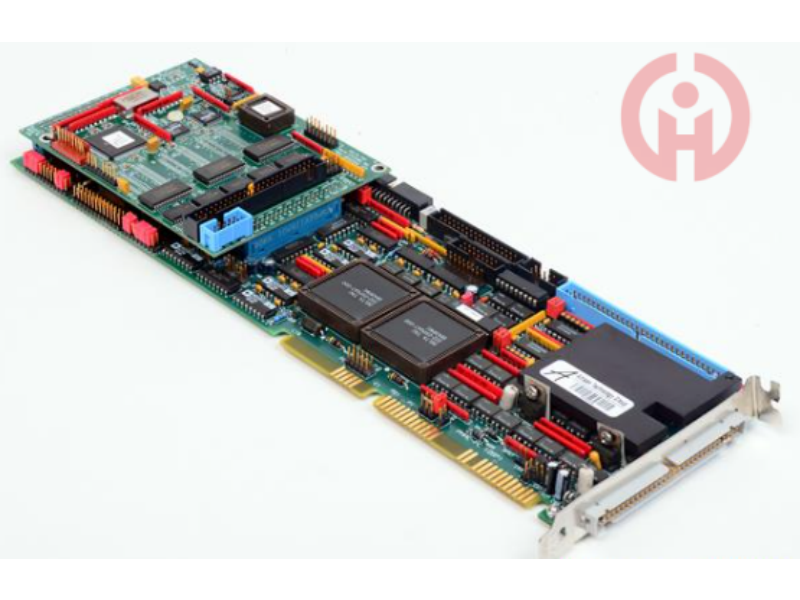
The Turbo PMAC2 PCI Ultralite is a member of the Turbo PMAC family of boards optimized for interface to the system through the MACRO ring and therefore does not contain on-board axis interface circuitry (which is what makes it Ultralite). It can command up to 32 axes through a MACRO ring. It can also support up to 32 channels of off-board axis interface circuitry through its expansion port, connected to ACC-24P or ACC-24P2 boards.
The Turbo PMAC2 PCI Ultralite is a full-sized PCI-bus expansion card. The PC can communicate to PMAC through the PCI slot or through a RS-232 or RS-422 serial port if standalone operation (i.e. without a PC) is desired.
Brand:DELTA TAU
Origin:USA
The Turbo PMAC2 PCI Ultralite is a member of the Turbo PMAC family of boards optimized for interface to the system through the MACRO ring and therefore does not contain on-board axis interface circuitry (which is what makes it Ultralite). It can command up to 32 axes through a MACRO ring. It can also support up to 32 channels of off-board axis interface circuitry through its expansion port, connected to ACC-24P or ACC-24P2 boards.
The Turbo PMAC2 PCI Ultralite is a full-sized PCI-bus expansion card. The PC can communicate to PMAC through the PCI slot or through a RS-232 or RS-422 serial port if standalone operation (i.e. without a PC) is desired.
Product Introduction
Hardware Features
80 MHz DSP56303 CPU (120 MHz PMAC equivalent)
128k x 24 SRAM compiled/assembled program memory (5C0)
128k x 24 SRAM user data memory (5C0)
1M x 8 flash memory for user backup & firmware (5C0)
Latest released firmware version
RS-232/422 serial interface, PCI bus interface
One 16-node MACRO interface IC
MACRO ring circuitry (without connectors; see Opts. A & C) (No on-board axis interface circuitry)
Two channels supplemental interface circuitry, each including:
2-channel differential/single-ended encoder input
One output command signal set, configurable as pulse-and direction or PWM top-and-bottom pair
Display, MACRO, muxed I/O, direct I/O interface ports
PID/notch/feedforward servo algorithms
Extended pole-placement servo algorithms
Software Features
Trajectory Generation Features
Linear interpolation mode with S-curve accel/decel
Circular interpolation mode with S-curve accel/decel
Rapid point-to-point move mode
Cubic B-spline interpolation mode
Cubic Hermite-spline (PVT) interpolation mode
Automatic move-until-trigger functions with hardware capture
Altered destination on the fly
Interactive jog moves
Multi-move look ahead for velocity and acceleration limiting
Servo Features
Standard digital PID feedback filter
Velocity, acceleration, and friction feedforward
2nd-order notch/low-pass filter
Gains changeable at any time
Programmable input, integrator, and output limits
Alternate 35-term “pole-placement” servo filter
Alternate user-written high-level “Open Servo” algorithms
Commutation Features
Sinusoidal commutation of AC servo motors
Vector control of AC induction motors
Digital current-loop closure with direct PWM output (PMAC2)
Compensation Features
Position compensation tables (1D & 2D)
Torque compensation tables
Backlash compensation
Tool radius compensation
Safety Features
Hardware and software overtravel limits
Amplifier enable/fault handshaking
Following error limits
Integrated current limit
Encoder loss detection (some versions)
Watchdog timer
Program and communications checksums
Computational Features
Real-time multi-tasking operating system
48-bit floating-point math for user programs
Trigonometric and transcendental functions
Automatic type-matching of different variable types
User-defined pointer variables to any registers
Feedback sensor types that can be processed
Digital quadrature encoders
Sinusoidal encoders, interferometers
Resolvers
Potentiometers
LVDTs, RVDTs
Parallel-format encoders, interferometers
MLDTs
Serial absolute encoders (e.g. SSI)
Coordination and Master/Slave Features
User-defined coordinate systems for automatic coordination of axes
Separate coordinate systems for independent motion of axes
Multi-motor axis support (e.g. gantries)
Motion Program Features
High-level programming language
Automatic sequenced execution of moves
Calculations and I/O synchronous to motion
Axes programmed in user engineering units
Motion values as constants or expressions
Automatic coordination of multiple axes
Ability to execute G-code programs
PLC Program Features
Execution asynchronous to programmed motion
I/O control as in hardware PLC
Executive functions for standalone applications
Safety and status monitoring
Servo gain scheduling
Data reporting functions
Access to all registers in controller
Communication Options
OPT-2 - On-board 32Kx16 Dual Ported RAM
OPT-9T - Auxiliary RS-232 serial port
Processor and Firmware Options
OPT-10 - Firmware version specification
OPT-5C0 - Default CPU-speed/memory config: 80MHz DSP56303 CPU
OPT-5C3 - 80MHz DSP56303 CPU
OPT-5E0 - 160MHz DSP56311 CPU (128Kx24 internal memory)
OPT-5E3 - 160MHz DSP56311 CPU (128Kx24 internal memory)
Base Board Options
OPT-12 - 8-channel on-board 12-bit A/D converter
OPT-12A - Additional 8-channel on-board 12-bit A/D converter
OPT-16A - 32Kx24 SRAM battery-backed parameter memory.
OPT-18A - Electronic Board Identification Number Module
OPT-8A - High-accuracy clock crystal (+/-15ppm)
Connector Options
OPT-A - MACRO-ring fiber optic interface connector
OPT-C - MACRO-ring RJ-45 electrical interface connector
Macro Node Expansion
OPT-1U1 - Additional 16-Node MACRO Interface
OPT-1U2 - Second additional MACRO interface IC
OPT-1U3 - Third additional MACRO interface IC
· Many products are not yet on the shelves please contact us for more products.
· If there is inconsistency between the product model and the display picture, the model shall prevail, please contact us for specific product pictures, we will arrange to take pictures in the warehouse to confirm!
Technical Team Service Hotline:csyili980622@gmail.com Wechat/SKYPE:+86 13306931261
Postal Code: 350300
Mobile: (+86) 15606940871
Email: zhddqjt@gmail.comAddress: Building 9, Liandong U Valley Economic and Technological Innovation Center, Yangxia Industrial Zone, Fuqing City, Fujian Province,China

Follow official account